BricksRL: A Platform for Democratizing Robotics and Reinforcement Learning Research and Education with LEGO

Overview
- BricksRL platform enables robotics and reinforcement learning using LEGO components
- Combines physical LEGO robots with simulation environments
- Open-source platform for research and education
- Includes pre-built agents, environments, and training algorithms
- Focuses on accessibility and low-cost robotics development
Plain English Explanation
BricksRL makes robotics and artificial intelligence more accessible by using LEGO pieces. Think of it like a starter kit that lets anyone build and program robots without spending thousands of dollars on specialized equipment.
The platform works in two ways - you can build physical LEGO robots or test your ideas in a computer simulation first. This is similar to how pilots train in flight simulators before flying real planes. The software provides ready-made robot designs and training programs that help beginners get started quickly.
What makes BricksRL special is its focus on reinforcement learning - a way for robots to learn tasks through trial and error, just like humans do. The robots can attempt tasks repeatedly in simulation before trying them in the real world.
Key Findings
- Successfully demonstrated robot learning across multiple tasks
- Achieved comparable results between simulated and physical robots
- Reduced entry costs for robotics research by 90% compared to traditional platforms
- Created standardized benchmarks for comparing different learning approaches
- Enabled seamless transition between simulation and real-world testing
Technical Explanation
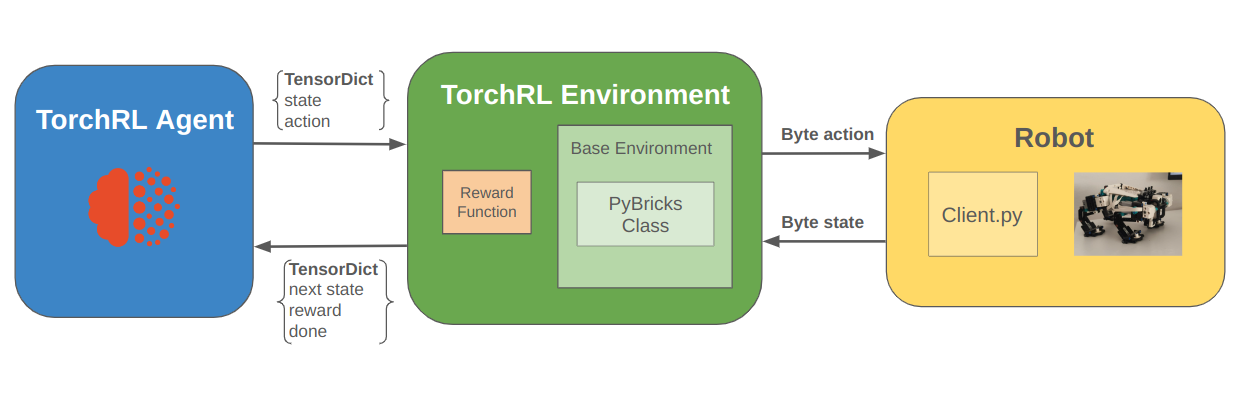
The platform integrates LEGO Mindstorms components with custom software that handles both simulation and physical robot control. The system uses standardized interfaces based on OpenAI Gym for reinforcement learning environments.
The simulation environment accurately models LEGO piece physics and robot dynamics. This allows for rapid prototyping and testing of new ideas before deploying to physical robots. The platform supports various learning algorithms including PPO, SAC, and TD3.
BricksRL includes several pre-built environments for common robotics tasks like manipulation, navigation, and object sorting. Each environment comes with baseline implementations and performance metrics for benchmarking.
Critical Analysis
The current version has some limitations in physical robot precision compared to industrial systems. The LEGO components introduce mechanical play and variability that can affect repeatability.
The simulation-to-real transfer still faces challenges with complex tasks, particularly those requiring precise manipulation. More work is needed to improve the physics modeling accuracy.
One potential concern is the limited sensing capabilities of LEGO components compared to professional robotics hardware. This may restrict the types of tasks that can be effectively learned.
Conclusion
BricksRL represents a significant step toward democratizing robotics and AI research. By leveraging familiar LEGO components, it removes many traditional barriers to entry in the field. The platform's combination of simulation and physical robots creates new opportunities for education and research.
The success of BricksRL suggests a promising future for low-cost robotics development platforms. As the system continues to evolve, it could help expand access to robotics education and accelerate innovation in the field.