SAM
Overview
SAM (Segment Anything Model) was proposed in Segment Anything by Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alex Berg, Wan-Yen Lo, Piotr Dollar, Ross Girshick.
The model can be used to predict segmentation masks of any object of interest given an input image.

The abstract from the paper is the following:
We introduce the Segment Anything (SA) project: a new task, model, and dataset for image segmentation. Using our efficient model in a data collection loop, we built the largest segmentation dataset to date (by far), with over 1 billion masks on 11M licensed and privacy respecting images. The model is designed and trained to be promptable, so it can transfer zero-shot to new image distributions and tasks. We evaluate its capabilities on numerous tasks and find that its zero-shot performance is impressive — often competitive with or even superior to prior fully supervised results. We are releasing the Segment Anything Model (SAM) and corresponding dataset (SA-1B) of 1B masks and 11M images at https://segment-anything.com to foster research into foundation models for computer vision.
Tips:
- The model predicts binary masks that states the presence or not of the object of interest given an image.
- The model predicts much better results if input 2D points and/or input bounding boxes are provided
- You can prompt multiple points for the same image, and predict a single mask.
- Fine-tuning the model is not supported yet
- According to the paper, textual input should be also supported. However, at this time of writing this seems to be not supported according to the official repository.
This model was contributed by ybelkada and ArthurZ. The original code can be found here.
Below is an example on how to run mask generation given an image and a 2D point:
import torch
from PIL import Image
import requests
from transformers import SamModel, SamProcessor
device = "cuda" if torch.cuda.is_available() else "cpu"
model = SamModel.from_pretrained("facebook/sam-vit-huge").to(device)
processor = SamProcessor.from_pretrained("facebook/sam-vit-huge")
img_url = "https://huggingface.co/ybelkada/segment-anything/resolve/main/assets/car.png"
raw_image = Image.open(requests.get(img_url, stream=True).raw).convert("RGB")
input_points = [[[450, 600]]] # 2D location of a window in the image
inputs = processor(raw_image, input_points=input_points, return_tensors="pt").to(device)
with torch.no_grad():
outputs = model(**inputs)
masks = processor.image_processor.post_process_masks(
outputs.pred_masks.cpu(), inputs["original_sizes"].cpu(), inputs["reshaped_input_sizes"].cpu()
)
scores = outputs.iou_scoresYou can also process your own masks alongside the input images in the processor to be passed to the model.
import torch
from PIL import Image
import requests
from transformers import SamModel, SamProcessor
device = "cuda" if torch.cuda.is_available() else "cpu"
model = SamModel.from_pretrained("facebook/sam-vit-huge").to(device)
processor = SamProcessor.from_pretrained("facebook/sam-vit-huge")
img_url = "https://huggingface.co/ybelkada/segment-anything/resolve/main/assets/car.png"
raw_image = Image.open(requests.get(img_url, stream=True).raw).convert("RGB")
mask_url = "https://huggingface.co/ybelkada/segment-anything/resolve/main/assets/car.png"
segmentation_map = Image.open(requests.get(mask_url, stream=True).raw).convert("1")
input_points = [[[450, 600]]] # 2D location of a window in the image
inputs = processor(raw_image, input_points=input_points, segmentation_maps=segmentation_map, return_tensors="pt").to(device)
with torch.no_grad():
outputs = model(**inputs)
masks = processor.image_processor.post_process_masks(
outputs.pred_masks.cpu(), inputs["original_sizes"].cpu(), inputs["reshaped_input_sizes"].cpu()
)
scores = outputs.iou_scoresResources
A list of official Hugging Face and community (indicated by 🌎) resources to help you get started with SAM.
- Demo notebook for using the model.
- Demo notebook for using the automatic mask generation pipeline.
- Demo notebook for inference with MedSAM, a fine-tuned version of SAM on the medical domain. 🌎
- Demo notebook for fine-tuning the model on custom data. 🌎
SlimSAM
SlimSAM, a pruned version of SAM, was proposed in 0.1% Data Makes Segment Anything Slim by Zigeng Chen et al. SlimSAM reduces the size of the SAM models considerably while maintaining the same performance.
Checkpoints can be found on the hub, and they can be used as a drop-in replacement of SAM.
Grounded SAM
One can combine Grounding DINO with SAM for text-based mask generation as introduced in Grounded SAM: Assembling Open-World Models for Diverse Visual Tasks. You can refer to this demo notebook 🌍 for details.
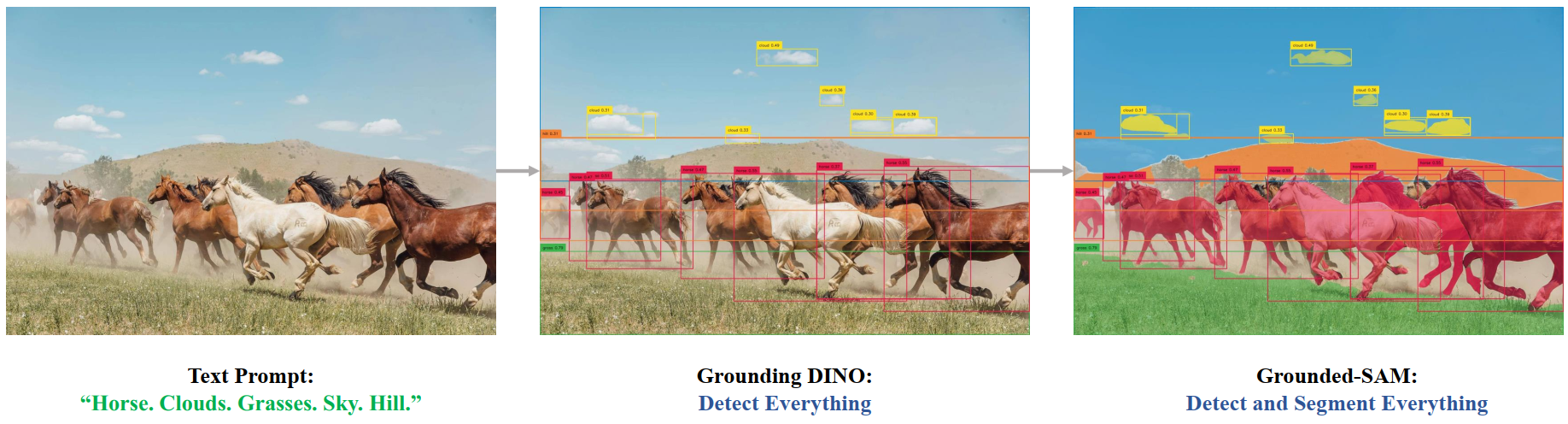 Grounded SAM overview. Taken from the original repository.
Grounded SAM overview. Taken from the original repository. SamConfig
class transformers.SamConfig
< source >( vision_config = None prompt_encoder_config = None mask_decoder_config = None initializer_range = 0.02 **kwargs )
Parameters
- vision_config (Union[
dict,SamVisionConfig], optional) — Dictionary of configuration options used to initialize SamVisionConfig. - prompt_encoder_config (Union[
dict,SamPromptEncoderConfig], optional) — Dictionary of configuration options used to initialize SamPromptEncoderConfig. - mask_decoder_config (Union[
dict,SamMaskDecoderConfig], optional) — Dictionary of configuration options used to initialize SamMaskDecoderConfig. - kwargs (optional) — Dictionary of keyword arguments.
SamConfig is the configuration class to store the configuration of a SamModel. It is used to instantiate a SAM model according to the specified arguments, defining the vision model, prompt-encoder model and mask decoder configs. Instantiating a configuration with the defaults will yield a similar configuration to that of the SAM-ViT-H facebook/sam-vit-huge architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
Example:
>>> from transformers import (
... SamVisionConfig,
... SamPromptEncoderConfig,
... SamMaskDecoderConfig,
... SamModel,
... )
>>> # Initializing a SamConfig with `"facebook/sam-vit-huge"` style configuration
>>> configuration = SamConfig()
>>> # Initializing a SamModel (with random weights) from the `"facebook/sam-vit-huge"` style configuration
>>> model = SamModel(configuration)
>>> # Accessing the model configuration
>>> configuration = model.config
>>> # We can also initialize a SamConfig from a SamVisionConfig, SamPromptEncoderConfig, and SamMaskDecoderConfig
>>> # Initializing SAM vision, SAM Q-Former and language model configurations
>>> vision_config = SamVisionConfig()
>>> prompt_encoder_config = SamPromptEncoderConfig()
>>> mask_decoder_config = SamMaskDecoderConfig()
>>> config = SamConfig(vision_config, prompt_encoder_config, mask_decoder_config)SamVisionConfig
class transformers.SamVisionConfig
< source >( hidden_size = 768 output_channels = 256 num_hidden_layers = 12 num_attention_heads = 12 num_channels = 3 image_size = 1024 patch_size = 16 hidden_act = 'gelu' layer_norm_eps = 1e-06 attention_dropout = 0.0 initializer_range = 1e-10 qkv_bias = True mlp_ratio = 4.0 use_abs_pos = True use_rel_pos = True window_size = 14 global_attn_indexes = [2, 5, 8, 11] num_pos_feats = 128 mlp_dim = None **kwargs )
Parameters
- hidden_size (
int, optional, defaults to 768) — Dimensionality of the encoder layers and the pooler layer. - output_channels (
int, optional, defaults to 256) — Dimensionality of the output channels in the Patch Encoder. - num_hidden_layers (
int, optional, defaults to 12) — Number of hidden layers in the Transformer encoder. - num_attention_heads (
int, optional, defaults to 12) — Number of attention heads for each attention layer in the Transformer encoder. - num_channels (
int, optional, defaults to 3) — Number of channels in the input image. - image_size (
int, optional, defaults to 1024) — Expected resolution. Target size of the resized input image. - patch_size (
int, optional, defaults to 16) — Size of the patches to be extracted from the input image. - hidden_act (
str, optional, defaults to"gelu") — The non-linear activation function (function or string) - layer_norm_eps (
float, optional, defaults to 1e-06) — The epsilon used by the layer normalization layers. - attention_dropout (
float, optional, defaults to 0.0) — The dropout ratio for the attention probabilities. - initializer_range (
float, optional, defaults to 1e-10) — The standard deviation of the truncated_normal_initializer for initializing all weight matrices. - qkv_bias (
bool, optional, defaults toTrue) — Whether to add a bias to query, key, value projections. - mlp_ratio (
float, optional, defaults to 4.0) — Ratio of mlp hidden dim to embedding dim. - use_abs_pos (
bool, optional, defaults toTrue) — Whether to use absolute position embedding. - use_rel_pos (
bool, optional, defaults toTrue) — Whether to use relative position embedding. - window_size (
int, optional, defaults to 14) — Window size for relative position. - global_attn_indexes (
List[int], optional, defaults to[2, 5, 8, 11]) — The indexes of the global attention layers. - num_pos_feats (
int, optional, defaults to 128) — The dimensionality of the position embedding. - mlp_dim (
int, optional) — The dimensionality of the MLP layer in the Transformer encoder. IfNone, defaults tomlp_ratio * hidden_size.
This is the configuration class to store the configuration of a SamVisionModel. It is used to instantiate a SAM
vision encoder according to the specified arguments, defining the model architecture. Instantiating a configuration
defaults will yield a similar configuration to that of the SAM ViT-h
facebook/sam-vit-huge architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
SamMaskDecoderConfig
class transformers.SamMaskDecoderConfig
< source >( hidden_size = 256 hidden_act = 'relu' mlp_dim = 2048 num_hidden_layers = 2 num_attention_heads = 8 attention_downsample_rate = 2 num_multimask_outputs = 3 iou_head_depth = 3 iou_head_hidden_dim = 256 layer_norm_eps = 1e-06 **kwargs )
Parameters
- hidden_size (
int, optional, defaults to 256) — Dimensionality of the hidden states. - hidden_act (
str, optional, defaults to"relu") — The non-linear activation function used inside theSamMaskDecodermodule. - mlp_dim (
int, optional, defaults to 2048) — Dimensionality of the “intermediate” (i.e., feed-forward) layer in the Transformer encoder. - num_hidden_layers (
int, optional, defaults to 2) — Number of hidden layers in the Transformer encoder. - num_attention_heads (
int, optional, defaults to 8) — Number of attention heads for each attention layer in the Transformer encoder. - attention_downsample_rate (
int, optional, defaults to 2) — The downsampling rate of the attention layer. - num_multimask_outputs (
int, optional, defaults to 3) — The number of outputs from theSamMaskDecodermodule. In the Segment Anything paper, this is set to 3. - iou_head_depth (
int, optional, defaults to 3) — The number of layers in the IoU head module. - iou_head_hidden_dim (
int, optional, defaults to 256) — The dimensionality of the hidden states in the IoU head module. - layer_norm_eps (
float, optional, defaults to 1e-06) — The epsilon used by the layer normalization layers.
This is the configuration class to store the configuration of a SamMaskDecoder. It is used to instantiate a SAM
mask decoder to the specified arguments, defining the model architecture. Instantiating a configuration defaults
will yield a similar configuration to that of the SAM-vit-h
facebook/sam-vit-huge architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
SamPromptEncoderConfig
class transformers.SamPromptEncoderConfig
< source >( hidden_size = 256 image_size = 1024 patch_size = 16 mask_input_channels = 16 num_point_embeddings = 4 hidden_act = 'gelu' layer_norm_eps = 1e-06 **kwargs )
Parameters
- hidden_size (
int, optional, defaults to 256) — Dimensionality of the hidden states. - image_size (
int, optional, defaults to 1024) — The expected output resolution of the image. - patch_size (
int, optional, defaults to 16) — The size (resolution) of each patch. - mask_input_channels (
int, optional, defaults to 16) — The number of channels to be fed to theMaskDecodermodule. - num_point_embeddings (
int, optional, defaults to 4) — The number of point embeddings to be used. - hidden_act (
str, optional, defaults to"gelu") — The non-linear activation function in the encoder and pooler.
This is the configuration class to store the configuration of a SamPromptEncoder. The SamPromptEncoder
module is used to encode the input 2D points and bounding boxes. Instantiating a configuration defaults will yield
a similar configuration to that of the SAM-vit-h
facebook/sam-vit-huge architecture.
Configuration objects inherit from PretrainedConfig and can be used to control the model outputs. Read the documentation from PretrainedConfig for more information.
SamProcessor
class transformers.SamProcessor
< source >( image_processor )
Parameters
- image_processor (
SamImageProcessor) — An instance of SamImageProcessor. The image processor is a required input.
Constructs a SAM processor which wraps a SAM image processor and an 2D points & Bounding boxes processor into a single processor.
SamProcessor offers all the functionalities of SamImageProcessor. See the docstring of call() for more information.
SamImageProcessor
class transformers.SamImageProcessor
< source >( do_resize: bool = True size: Dict = None mask_size: Dict = None resample: Resampling = <Resampling.BILINEAR: 2> do_rescale: bool = True rescale_factor: Union = 0.00392156862745098 do_normalize: bool = True image_mean: Union = None image_std: Union = None do_pad: bool = True pad_size: int = None mask_pad_size: int = None do_convert_rgb: bool = True **kwargs )
Parameters
- do_resize (
bool, optional, defaults toTrue) — Whether to resize the image’s (height, width) dimensions to the specifiedsize. Can be overridden by thedo_resizeparameter in thepreprocessmethod. - size (
dict, optional, defaults to{"longest_edge" -- 1024}): Size of the output image after resizing. Resizes the longest edge of the image to matchsize["longest_edge"]while maintaining the aspect ratio. Can be overridden by thesizeparameter in thepreprocessmethod. - mask_size (
dict, optional, defaults to{"longest_edge" -- 256}): Size of the output segmentation map after resizing. Resizes the longest edge of the image to matchsize["longest_edge"]while maintaining the aspect ratio. Can be overridden by themask_sizeparameter in thepreprocessmethod. - resample (
PILImageResampling, optional, defaults toResampling.BILINEAR) — Resampling filter to use if resizing the image. Can be overridden by theresampleparameter in thepreprocessmethod. - do_rescale (
bool, optional, defaults toTrue) — Wwhether to rescale the image by the specified scalerescale_factor. Can be overridden by thedo_rescaleparameter in thepreprocessmethod. - rescale_factor (
intorfloat, optional, defaults to1/255) — Scale factor to use if rescaling the image. Only has an effect ifdo_rescaleis set toTrue. Can be overridden by therescale_factorparameter in thepreprocessmethod. - do_normalize (
bool, optional, defaults toTrue) — Whether to normalize the image. Can be overridden by thedo_normalizeparameter in thepreprocessmethod. Can be overridden by thedo_normalizeparameter in thepreprocessmethod. - image_mean (
floatorList[float], optional, defaults toIMAGENET_DEFAULT_MEAN) — Mean to use if normalizing the image. This is a float or list of floats the length of the number of channels in the image. Can be overridden by theimage_meanparameter in thepreprocessmethod. Can be overridden by theimage_meanparameter in thepreprocessmethod. - image_std (
floatorList[float], optional, defaults toIMAGENET_DEFAULT_STD) — Standard deviation to use if normalizing the image. This is a float or list of floats the length of the number of channels in the image. Can be overridden by theimage_stdparameter in thepreprocessmethod. Can be overridden by theimage_stdparameter in thepreprocessmethod. - do_pad (
bool, optional, defaults toTrue) — Whether to pad the image to the specifiedpad_size. Can be overridden by thedo_padparameter in thepreprocessmethod. - pad_size (
dict, optional, defaults to{"height" -- 1024, "width": 1024}): Size of the output image after padding. Can be overridden by thepad_sizeparameter in thepreprocessmethod. - mask_pad_size (
dict, optional, defaults to{"height" -- 256, "width": 256}): Size of the output segmentation map after padding. Can be overridden by themask_pad_sizeparameter in thepreprocessmethod. - do_convert_rgb (
bool, optional, defaults toTrue) — Whether to convert the image to RGB.
Constructs a SAM image processor.
filter_masks
< source >( masks iou_scores original_size cropped_box_image pred_iou_thresh = 0.88 stability_score_thresh = 0.95 mask_threshold = 0 stability_score_offset = 1 return_tensors = 'pt' )
Parameters
- masks (
Union[torch.Tensor, tf.Tensor]) — Input masks. - iou_scores (
Union[torch.Tensor, tf.Tensor]) — List of IoU scores. - original_size (
Tuple[int,int]) — Size of the orginal image. - cropped_box_image (
np.array) — The cropped image. - pred_iou_thresh (
float, optional, defaults to 0.88) — The threshold for the iou scores. - stability_score_thresh (
float, optional, defaults to 0.95) — The threshold for the stability score. - mask_threshold (
float, optional, defaults to 0) — The threshold for the predicted masks. - stability_score_offset (
float, optional, defaults to 1) — The offset for the stability score used in the_compute_stability_scoremethod. - return_tensors (
str, optional, defaults topt) — Ifpt, returnstorch.Tensor. Iftf, returnstf.Tensor.
Filters the predicted masks by selecting only the ones that meets several criteria. The first criterion being
that the iou scores needs to be greater than pred_iou_thresh. The second criterion is that the stability
score needs to be greater than stability_score_thresh. The method also converts the predicted masks to
bounding boxes and pad the predicted masks if necessary.
generate_crop_boxes
< source >( image target_size crop_n_layers: int = 0 overlap_ratio: float = 0.3413333333333333 points_per_crop: Optional = 32 crop_n_points_downscale_factor: Optional = 1 device: Optional = None input_data_format: Union = None return_tensors: str = 'pt' )
Parameters
- image (
np.array) — Input original image - target_size (
int) — Target size of the resized image - crop_n_layers (
int, optional, defaults to 0) — If >0, mask prediction will be run again on crops of the image. Sets the number of layers to run, where each layer has 2**i_layer number of image crops. - overlap_ratio (
float, optional, defaults to 512/1500) — Sets the degree to which crops overlap. In the first crop layer, crops will overlap by this fraction of the image length. Later layers with more crops scale down this overlap. - points_per_crop (
int, optional, defaults to 32) — Number of points to sample from each crop. - crop_n_points_downscale_factor (
List[int], optional, defaults to 1) — The number of points-per-side sampled in layer n is scaled down by crop_n_points_downscale_factor**n. - device (
torch.device, optional, defaults to None) — Device to use for the computation. If None, cpu will be used. - input_data_format (
strorChannelDimension, optional) — The channel dimension format of the input image. If not provided, it will be inferred. - return_tensors (
str, optional, defaults topt) — Ifpt, returnstorch.Tensor. Iftf, returnstf.Tensor.
Generates a list of crop boxes of different sizes. Each layer has (2i)2 boxes for the ith layer.
pad_image
< source >( image: ndarray pad_size: Dict data_format: Union = None input_data_format: Union = None **kwargs )
Parameters
- image (
np.ndarray) — Image to pad. - pad_size (
Dict[str, int]) — Size of the output image after padding. - data_format (
strorChannelDimension, optional) — The data format of the image. Can be either “channels_first” or “channels_last”. IfNone, thedata_formatof theimagewill be used. - input_data_format (
strorChannelDimension, optional) — The channel dimension format of the input image. If not provided, it will be inferred.
Pad an image to (pad_size["height"], pad_size["width"]) with zeros to the right and bottom.
post_process_for_mask_generation
< source >( all_masks all_scores all_boxes crops_nms_thresh return_tensors = 'pt' )
Parameters
- all_masks (
Union[List[torch.Tensor], List[tf.Tensor]]) — List of all predicted segmentation masks - all_scores (
Union[List[torch.Tensor], List[tf.Tensor]]) — List of all predicted iou scores - all_boxes (
Union[List[torch.Tensor], List[tf.Tensor]]) — List of all bounding boxes of the predicted masks - crops_nms_thresh (
float) — Threshold for NMS (Non Maximum Suppression) algorithm. - return_tensors (
str, optional, defaults topt) — Ifpt, returnstorch.Tensor. Iftf, returnstf.Tensor.
Post processes mask that are generated by calling the Non Maximum Suppression algorithm on the predicted masks.
post_process_masks
< source >( masks original_sizes reshaped_input_sizes mask_threshold = 0.0 binarize = True pad_size = None return_tensors = 'pt' ) → (Union[torch.Tensor, tf.Tensor])
Parameters
- masks (
Union[List[torch.Tensor], List[np.ndarray], List[tf.Tensor]]) — Batched masks from the mask_decoder in (batch_size, num_channels, height, width) format. - original_sizes (
Union[torch.Tensor, tf.Tensor, List[Tuple[int,int]]]) — The original sizes of each image before it was resized to the model’s expected input shape, in (height, width) format. - reshaped_input_sizes (
Union[torch.Tensor, tf.Tensor, List[Tuple[int,int]]]) — The size of each image as it is fed to the model, in (height, width) format. Used to remove padding. - mask_threshold (
float, optional, defaults to 0.0) — The threshold to use for binarizing the masks. - binarize (
bool, optional, defaults toTrue) — Whether to binarize the masks. - pad_size (
int, optional, defaults toself.pad_size) — The target size the images were padded to before being passed to the model. If None, the target size is assumed to be the processor’spad_size. - return_tensors (
str, optional, defaults to"pt") — If"pt", return PyTorch tensors. If"tf", return TensorFlow tensors.
Returns
(Union[torch.Tensor, tf.Tensor])
Batched masks in batch_size, num_channels, height, width) format, where (height, width) is given by original_size.
Remove padding and upscale masks to the original image size.
preprocess
< source >( images: Union segmentation_maps: Union = None do_resize: Optional = None size: Optional = None mask_size: Optional = None resample: Optional = None do_rescale: Optional = None rescale_factor: Union = None do_normalize: Optional = None image_mean: Union = None image_std: Union = None do_pad: Optional = None pad_size: Optional = None mask_pad_size: Optional = None do_convert_rgb: Optional = None return_tensors: Union = None data_format: ChannelDimension = <ChannelDimension.FIRST: 'channels_first'> input_data_format: Union = None **kwargs )
Parameters
- images (
ImageInput) — Image to preprocess. Expects a single or batch of images with pixel values ranging from 0 to 255. If passing in images with pixel values between 0 and 1, setdo_rescale=False. - segmentation_maps (
ImageInput, optional) — Segmentation map to preprocess. - do_resize (
bool, optional, defaults toself.do_resize) — Whether to resize the image. - size (
Dict[str, int], optional, defaults toself.size) — Controls the size of the image afterresize. The longest edge of the image is resized tosize["longest_edge"]whilst preserving the aspect ratio. - mask_size (
Dict[str, int], optional, defaults toself.mask_size) — Controls the size of the segmentation map afterresize. The longest edge of the image is resized tosize["longest_edge"]whilst preserving the aspect ratio. - resample (
PILImageResampling, optional, defaults toself.resample) —PILImageResamplingfilter to use when resizing the image e.g.PILImageResampling.BILINEAR. - do_rescale (
bool, optional, defaults toself.do_rescale) — Whether to rescale the image pixel values by rescaling factor. - rescale_factor (
intorfloat, optional, defaults toself.rescale_factor) — Rescale factor to apply to the image pixel values. - do_normalize (
bool, optional, defaults toself.do_normalize) — Whether to normalize the image. - image_mean (
floatorList[float], optional, defaults toself.image_mean) — Image mean to normalize the image by ifdo_normalizeis set toTrue. - image_std (
floatorList[float], optional, defaults toself.image_std) — Image standard deviation to normalize the image by ifdo_normalizeis set toTrue. - do_pad (
bool, optional, defaults toself.do_pad) — Whether to pad the image. - pad_size (
Dict[str, int], optional, defaults toself.pad_size) — Controls the size of the padding applied to the image. The image is padded topad_size["height"]andpad_size["width"]ifdo_padis set toTrue. - mask_pad_size (
Dict[str, int], optional, defaults toself.mask_pad_size) — Controls the size of the padding applied to the segmentation map. The image is padded tomask_pad_size["height"]andmask_pad_size["width"]ifdo_padis set toTrue. - do_convert_rgb (
bool, optional, defaults toself.do_convert_rgb) — Whether to convert the image to RGB. - return_tensors (
strorTensorType, optional) — The type of tensors to return. Can be one of:- Unset: Return a list of
np.ndarray. TensorType.TENSORFLOWor'tf': Return a batch of typetf.Tensor.TensorType.PYTORCHor'pt': Return a batch of typetorch.Tensor.TensorType.NUMPYor'np': Return a batch of typenp.ndarray.TensorType.JAXor'jax': Return a batch of typejax.numpy.ndarray.
- Unset: Return a list of
- data_format (
ChannelDimensionorstr, optional, defaults toChannelDimension.FIRST) — The channel dimension format for the output image. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format.- Unset: Use the channel dimension format of the input image.
- input_data_format (
ChannelDimensionorstr, optional) — The channel dimension format for the input image. If unset, the channel dimension format is inferred from the input image. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format."none"orChannelDimension.NONE: image in (height, width) format.
Preprocess an image or batch of images.
resize
< source >( image: ndarray size: Dict resample: Resampling = <Resampling.BICUBIC: 3> data_format: Union = None input_data_format: Union = None **kwargs ) → np.ndarray
Parameters
- image (
np.ndarray) — Image to resize. - size (
Dict[str, int]) — Dictionary in the format{"longest_edge": int}specifying the size of the output image. The longest edge of the image will be resized to the specified size, while the other edge will be resized to maintain the aspect ratio. resample —PILImageResamplingfilter to use when resizing the image e.g.PILImageResampling.BILINEAR. - data_format (
ChannelDimensionorstr, optional) — The channel dimension format for the output image. If unset, the channel dimension format of the input image is used. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format.
- input_data_format (
ChannelDimensionorstr, optional) — The channel dimension format for the input image. If unset, the channel dimension format is inferred from the input image. Can be one of:"channels_first"orChannelDimension.FIRST: image in (num_channels, height, width) format."channels_last"orChannelDimension.LAST: image in (height, width, num_channels) format.
Returns
np.ndarray
The resized image.
Resize an image to (size["height"], size["width"]).
SamModel
class transformers.SamModel
< source >( config )
Parameters
- config (SamConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
Segment Anything Model (SAM) for generating segmentation masks, given an input image and optional 2D location and bounding boxes. This model inherits from PreTrainedModel. Check the superclass documentation for the generic methods the library implements for all its model (such as downloading or saving, resizing the input embeddings, pruning heads etc.)
This model is also a PyTorch torch.nn.Module subclass. Use it as a regular PyTorch Module and refer to the PyTorch documentation for all matter related to general usage and behavior.
forward
< source >( pixel_values: Optional = None input_points: Optional = None input_labels: Optional = None input_boxes: Optional = None input_masks: Optional = None image_embeddings: Optional = None multimask_output: bool = True attention_similarity: Optional = None target_embedding: Optional = None output_attentions: Optional = None output_hidden_states: Optional = None return_dict: Optional = None **kwargs )
Parameters
- pixel_values (
torch.FloatTensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using SamProcessor. SeeSamProcessor.__call__()for details. - input_points (
torch.FloatTensorof shape(batch_size, num_points, 2)) — Input 2D spatial points, this is used by the prompt encoder to encode the prompt. Generally yields to much better results. The points can be obtained by passing a list of list of list to the processor that will create correspondingtorchtensors of dimension 4. The first dimension is the image batch size, the second dimension is the point batch size (i.e. how many segmentation masks do we want the model to predict per input point), the third dimension is the number of points per segmentation mask (it is possible to pass multiple points for a single mask), and the last dimension is the x (vertical) and y (horizontal) coordinates of the point. If a different number of points is passed either for each image, or for each mask, the processor will create “PAD” points that will correspond to the (0, 0) coordinate, and the computation of the embedding will be skipped for these points using the labels. - input_labels (
torch.LongTensorof shape(batch_size, point_batch_size, num_points)) — Input labels for the points, this is used by the prompt encoder to encode the prompt. According to the official implementation, there are 3 types of labels1: the point is a point that contains the object of interest0: the point is a point that does not contain the object of interest-1: the point corresponds to the background
We added the label:
-10: the point is a padding point, thus should be ignored by the prompt encoder
The padding labels should be automatically done by the processor.
- input_boxes (
torch.FloatTensorof shape(batch_size, num_boxes, 4)) — Input boxes for the points, this is used by the prompt encoder to encode the prompt. Generally yields to much better generated masks. The boxes can be obtained by passing a list of list of list to the processor, that will generate atorchtensor, with each dimension corresponding respectively to the image batch size, the number of boxes per image and the coordinates of the top left and botton right point of the box. In the order (x1,y1,x2,y2):x1: the x coordinate of the top left point of the input boxy1: the y coordinate of the top left point of the input boxx2: the x coordinate of the bottom right point of the input boxy2: the y coordinate of the bottom right point of the input box
- input_masks (
torch.FloatTensorof shape(batch_size, image_size, image_size)) — SAM model also accepts segmentation masks as input. The mask will be embedded by the prompt encoder to generate a corresponding embedding, that will be fed later on to the mask decoder. These masks needs to be manually fed by the user, and they need to be of shape (batch_size,image_size,image_size). - image_embeddings (
torch.FloatTensorof shape(batch_size, output_channels, window_size, window_size)) — Image embeddings, this is used by the mask decder to generate masks and iou scores. For more memory efficient computation, users can first retrieve the image embeddings using theget_image_embeddingsmethod, and then feed them to theforwardmethod instead of feeding thepixel_values. - multimask_output (
bool, optional) — In the original implementation and paper, the model always outputs 3 masks per image (or per point / per bounding box if relevant). However, it is possible to just output a single mask, that corresponds to the “best” mask, by specifyingmultimask_output=False. - attention_similarity (
torch.FloatTensor, optional) — Attention similarity tensor, to be provided to the mask decoder for target-guided attention in case the model is used for personalization as introduced in PerSAM. - target_embedding (
torch.FloatTensor, optional) — Embedding of the target concept, to be provided to the mask decoder for target-semantic prompting in case the model is used for personalization as introduced in PerSAM. - output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple.Example —
The SamModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.
TFSamModel
class transformers.TFSamModel
< source >( config **kwargs )
Parameters
- config (SamConfig) — Model configuration class with all the parameters of the model. Initializing with a config file does not load the weights associated with the model, only the configuration. Check out the from_pretrained() method to load the model weights.
Segment Anything Model (SAM) for generating segmentation masks, given an input image and optional 2D location and bounding boxes. This model inherits from TFPreTrainedModel. Check the superclass documentation for the generic methods the library implements for all its model (such as downloading or saving, resizing the input embeddings, pruning heads etc.)
This model is also a TensorFlow keras.Model subclass. Use it as a regular TensorFlow Model and refer to the TensorFlow documentation for all matter related to general usage and behavior.
call
< source >( pixel_values: TFModelInputType | None = None input_points: tf.Tensor | None = None input_labels: tf.Tensor | None = None input_boxes: tf.Tensor | None = None input_masks: tf.Tensor | None = None image_embeddings: tf.Tensor | None = None multimask_output: bool = True output_attentions: bool | None = None output_hidden_states: bool | None = None return_dict: bool | None = None training: bool = False **kwargs )
Parameters
- pixel_values (
tf.Tensorof shape(batch_size, num_channels, height, width)) — Pixel values. Pixel values can be obtained using SamProcessor. SeeSamProcessor.__call__()for details. - input_points (
tf.Tensorof shape(batch_size, num_points, 2)) — Input 2D spatial points, this is used by the prompt encoder to encode the prompt. Generally yields to much better results. The points can be obtained by passing a list of list of list to the processor that will create correspondingtftensors of dimension 4. The first dimension is the image batch size, the second dimension is the point batch size (i.e. how many segmentation masks do we want the model to predict per input point), the third dimension is the number of points per segmentation mask (it is possible to pass multiple points for a single mask), and the last dimension is the x (vertical) and y (horizontal) coordinates of the point. If a different number of points is passed either for each image, or for each mask, the processor will create “PAD” points that will correspond to the (0, 0) coordinate, and the computation of the embedding will be skipped for these points using the labels. - input_labels (
tf.Tensorof shape(batch_size, point_batch_size, num_points)) — Input labels for the points, this is used by the prompt encoder to encode the prompt. According to the official implementation, there are 3 types of labels1: the point is a point that contains the object of interest0: the point is a point that does not contain the object of interest-1: the point corresponds to the background
We added the label:
-10: the point is a padding point, thus should be ignored by the prompt encoder
The padding labels should be automatically done by the processor.
- input_boxes (
tf.Tensorof shape(batch_size, num_boxes, 4)) — Input boxes for the points, this is used by the prompt encoder to encode the prompt. Generally yields to much better generated masks. The boxes can be obtained by passing a list of list of list to the processor, that will generate atftensor, with each dimension corresponding respectively to the image batch size, the number of boxes per image and the coordinates of the top left and botton right point of the box. In the order (x1,y1,x2,y2):x1: the x coordinate of the top left point of the input boxy1: the y coordinate of the top left point of the input boxx2: the x coordinate of the bottom right point of the input boxy2: the y coordinate of the bottom right point of the input box
- input_masks (
tf.Tensorof shape(batch_size, image_size, image_size)) — SAM model also accepts segmentation masks as input. The mask will be embedded by the prompt encoder to generate a corresponding embedding, that will be fed later on to the mask decoder. These masks needs to be manually fed by the user, and they need to be of shape (batch_size,image_size,image_size). - image_embeddings (
tf.Tensorof shape(batch_size, output_channels, window_size, window_size)) — Image embeddings, this is used by the mask decder to generate masks and iou scores. For more memory efficient computation, users can first retrieve the image embeddings using theget_image_embeddingsmethod, and then feed them to thecallmethod instead of feeding thepixel_values. - multimask_output (
bool, optional) — In the original implementation and paper, the model always outputs 3 masks per image (or per point / per bounding box if relevant). However, it is possible to just output a single mask, that corresponds to the “best” mask, by specifyingmultimask_output=False. - output_attentions (
bool, optional) — Whether or not to return the attentions tensors of all attention layers. Seeattentionsunder returned tensors for more detail. - output_hidden_states (
bool, optional) — Whether or not to return the hidden states of all layers. Seehidden_statesunder returned tensors for more detail. - return_dict (
bool, optional) — Whether or not to return a ModelOutput instead of a plain tuple.
The TFSamModel forward method, overrides the __call__ special method.
Although the recipe for forward pass needs to be defined within this function, one should call the Module
instance afterwards instead of this since the former takes care of running the pre and post processing steps while
the latter silently ignores them.